
Introduction
Si vous aussi êtes fan de Mass Effect et avez investi dans l’édition collector de Mass Effect Andromeda, vous vous retrouvez sans doute avec un Nomad ND1 télécommandé par smartphone. Comme l’application Android est toute nulle perfectible et peu stable, il parait intéressant de piloter ce petit drone roulant à partir d’un PC ou, pourquoi pas, d’une radio commande conventionnelle.
Pour ce faire, je vais décortiquer la communication mise en place entre le Nomad et le smart phone.
Deux types de communication
Le Nomad est télécommandé (vitesse, direction, allumage des feux) mais dispose également d’une caméra afin de fournir un retour vidéo temps réel. Du coup, deux communications différentes sont utilisées.
Connexion WiFi
Tout d’abord, il est bon de préciser que la communication radio entre le smartphone et le Nomad est basée sur une liaison WiFi 2.4GHz. Le Nomad est un point d’accès avec serveur DHCP. Quand on connecte un périphérique réseau sur le Nomad, on obtient automatiquement une adresse IP.
Le Nomad sera toujours accessible à l’adresse 192.168.0.1.
Retour Vidéo
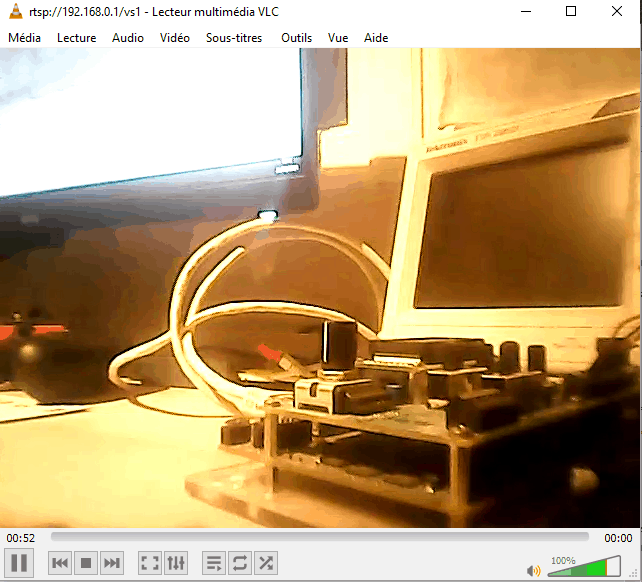
Je commence par exposer le fonctionnement du retour vidéo puisqu’il s’agit du moins complexe et qu’il peut être solutionné avec des logiciels comme VLC.
Le Nomad se comporte comme une caméra IP. Il héberge un serveur de streaming RTSP. Le point d’accès vidéo est vs1. Il est donc possible d’ouvrir le flux vidéo en accédant à l’adresse:
Télécommande
L’envoie des commandes au Nomad est un peu plus artisanal. En effet, la messagerie entre le smartphone et le Nomad exploite une communication UDP sans protocole standard particulier. Les informations qui vont suivre sont issues de mes observations et d’analyses réseaux faites avec WireShark. N’ayant qu’un seul Nomad sous la main, il est possible que le comportement décrit ne soit pas identique pour tous les modèles.
Première connexion
La communication UDP bidirectionnelle s’établit sur le port 8234. Comme l’UDP n’est pas un protocole en mode connecté, il est nécessaire de pouvoir vérifier la présence d’un interlocuteur de l’autre côté de la liaison. Pour ce faire, le Nomad propose une commande de ping.
Il est possible d’envoyer la chaine MAKO_CONNECT et le Nomad répond CONNECT_OK.
On notera au passage l’amalgame entre le mako et le nomade qui laisse supposé l’existence d’un mako radiocommandé?
Récupération du statut
Il est possible de récupérer l’état général du Nomad (niveau de batterie et allumage des feux). Pour ce faire, il faut envoyer la chaine MAKO_READ_BATT. Le Nomad va alors répondre trois lignes:
BATT=%d
LED1=%b
LED2=%b
On obtient le niveau de batterie entre 0 et 100%, ainsi que l’état des deux groupes de feux avant (0=éteint, 1=allumé)
Allumage des feux
Pour gérer les feux avant du Nomad, il y a les commande MAKO_LED%d_ON et MAKO_LED%d_OFF. Il est nécessaire de préciser dans la commande le numéro des feux à allumer ou éteindre (par exemple MAKO_LED1_ON ou MAKO_LED2_OFF). Le Nomad ne répond pas à ces commandes. Le statut des LED peut être récupérer par la commande précédente MAKO_READ_BATT.
Envoie des consignes
L’envoie des consignes est un peu plus problématique. En effet, une seule commande binaire est utilisée pour envoyer les consignes de vitesse avant, de vitesse arrière et de direction. En outre, la commande semble contenir un numéro unique qui, s’il est mal renseigné, bloque l’interprétation de la commande complète.
Voici la structure de la trame binaire envoyée. Les valeurs sont données en hexadécimal:
| ? Identifiant de trame ? | F-Throttle | R-Throttle | Stearing | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| C0 | A8 | 01 | 01 | 00 | 00 | 04 | 21 | Uint8 | Uint8 | Uint8 |
Les consignes de vitesse sont données en 0-255, soit en marche avant, soit en marche arrière.
La consignes de direction est également en 0-255, avec la valeur 128 pour aller tout droit. 0 tourne à gauche, 255 tourne à droite.
La réponse du Nomad à cette commande est assez impénétrable:
| ? Identifiant de trame ? | ? | ? | F-Throttle | R-Throttle | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C0 | A8 | 01 | 01 | 00 | 00 | 09 | F8 | 00 | 00 | Uint8 | Uint8 | Uint8 | Uint8 | 00 | 00 |
On y retrouve le même code qu’à la commande. Ensuite, il y a deux octets à 0, deux octets qui sembles avoir une valeur proche de 0x66, les recopies des deux consignes de vitesse et encore deux octets à 0.
Conclusion
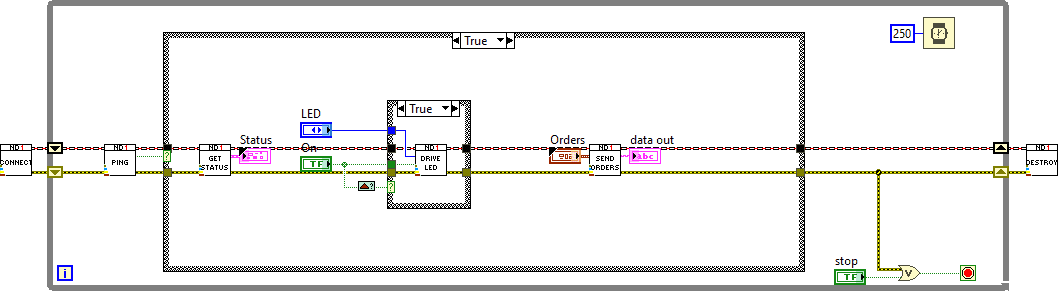
Même s’il reste quelques octets inexpliqués dans les trames d’envoie de consigne et de réponse, il est tout à fait possible de piloter le Nomad depuis n’importe quel périphérique WiFi. Voici d’ailleurs un driver LabVIEW permettant le pilotage du Nomad:
En outre, j’envisage le développement d’une interface Radio <-> WiFi à base d’ESP32. L’idée est de récupérer les signaux d’écolage radio, voir les PWM de pilotage servo issues d’un récepteurs modélisme et de générer les trames UDP « qui vont bien » afin de piloter le Nomad comme il se doit!
Si une âme charitable et possédant un Nomad peut tester le pilotage par UDP afin de s’assurer que la trame C0A8 0101 0000 0421 XXXX XX fonctionne sans modifications, le retour d’expérience sera intéressant pour compléter cette petite introduction au pilotage du Nomad 🙂